Purpose: To instruct on how to request additional logs from the internal receiver on the INS.
NOTE: Inertial Labs does not guarantee the correct operation of the INS when the customer requests additional logs from the receiver. This is responsibility of the customer.
Read More
Topics:
INS,
receiver,
Requesting,
Logs
Purpose: The purpose of this article is to show the difference in resolution values for Gyroscope, Accelerometer, Reference Altitude, Reference Position, GNSS Altitude, and GNSS Position data. The table below shows the units for the measurement and compares the maximum resolution for the corresponding data type for both Regular Resolution and HR Resolution. This applies to all Inertial Labs products (with exception of unit that does not contain GNSS receiver) unless specified otherwise.
Read More
Topics:
MRU,
AHRS,
IMU,
INS,
OptoINS,
OptoAHRS,
Resolution,
High,
Difference,
WOM,
HR,
Datatypes
Purpose: To instruct the user on what settings need to be configured such that one can monitor linear accelerations from an external monitoring point near, or around the INS.
Note: This will also change the monitoring point for position, and velocity. Additionally, it is assumed that the monitoring point is rigidly attached to the same fixture where the INS is mounted.
Last Updated: February, 2020
If offset is only a change in a few inches then the user may notice that the offset accounted for does not make a noticeable difference in sensor output.
Read More
Topics:
INS,
external,
Point,
Different,
Accelerations,
Measuring
Last Updated: October 2019
Purpose: The Inertial Labs INS has five methods of hard and soft iron calibrations for heading calculations.
1. 3D Calibration
Application: The 3D calibration is designed for carrier objects (typically aerial, or marine) that can operate in full heading, pitch and roll ranges. A possible application using this calibration method is bathymetric surveillance.
Read More
Topics:
INS,
Heading,
soft,
On-The-Fly,
Magnetometer,
iron,
calibration,
2D2T,
2D,
3D,
VG3D
Last Updated: July 2019
Preface:
This document describes the steps of the firmware update procedure for the Inertial Labs GPS-Aided Inertial Navigation Systems (INS), Motion Reference Units (MRU), and Attitude and Heading Reference Systems (AHRS) with embedded DGPS receivers. It holds for all members of the INS family – INS-B, INS-P, INS-PD, the MRU family – MRU-B, MRU-E, MRU-P, and MRU-PD, as well as the AHRS products.
Read More
Topics:
MRU,
AHRS,
INS,
INS-D,
INS-DL,
INS-B,
AHRS-II,
update,
Guide,
Firmware
Last Updated: October 2019
Purpose:
The purpose of this Guide is to explain how one uses the supplied IMU to IMR Converter. The converter is an executable file named “udd2txt” and supplied on-request by Inertial Labs customers. This executable is convenient for users of NovAtel’s Inertial Explorer Post-Processing software as it removes needed steps in converting file types for raw IMU data in Binary format, to the appropriate file type for post-processing (.imr) in Inertial Explorer. If you wish to have access to this tool, contact an Inertial Labs Support Member using:
Read More
Topics:
INS,
NovAtel,
IMR,
Inertial,
Explorer,
Post,
Processing
Purpose: Identify the pin outputs for the GNSS output on the INS-B, INS-P, INS-D, INS-DL
Read More
Topics:
INS,
INS-D,
INS-DL,
INS-B,
INS-P,
GNSS,
Pinout
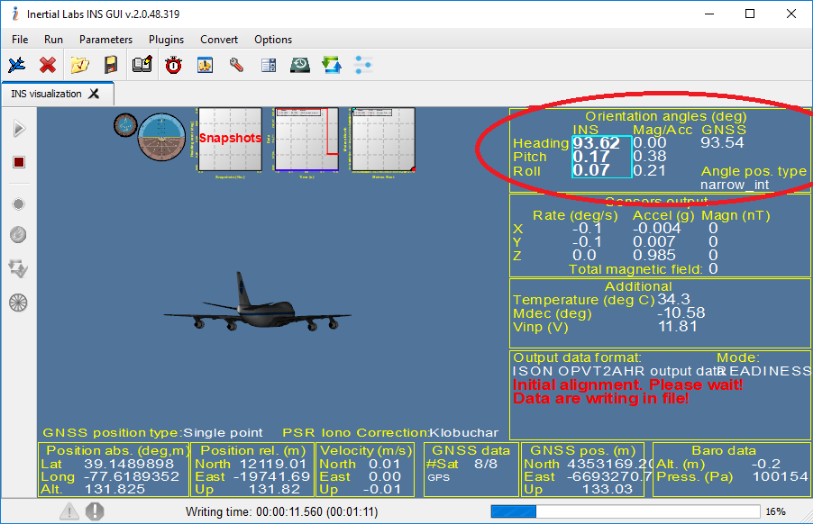
Purpose: To explain the orientation angles used for Inertial Labs devices and how they relate to one another.
Last Updated: August 2019
What's the difference and why does it matter?
Euler angles are generally what most people consider when they picture 3D space. Each value represents the rotation in degrees (it could technically be in any units) around one of the 3 axes in 3D space. Most of the time you will want to create angles using Euler angles because they are conceptually the easier to understand. The flaw is that Euler angles have a problem known as the gimbal lock that prevents certain rotations when two axes align. The solution: quaternions.
Read More
Topics:
MRU,
AHRS,
IMU,
INS,
AHRS-II,
Angles,
Quaternion,
Euler,
Gimbal,
Lock
Purpose: Diagnosing a common issue where the device is connect but heading as seen by device differs drastically compared to the GNSS heading.
Last Updated: July 2019
Common Issues:
1. The antennas are connected, but the heading of the INS starts with 0 (relative heading).
2. The INS heading differs a lot from the GNSS heading.
Read More
Topics:
Problem,
INS,
INS-DL,
Heading
Purpose: To configure the output offset in GUI; internally known as configuring “PV measuring point relative to the IMU”. This feature is to be used if the user wishes to output IMU data from another set point on the system. A common example would have the INS/IMU sitting near the CG of a aerospace vehicle, and you wish to compute position data for a fixed point located on the wing.
Read More
Topics:
IMU,
INS,
Arm,
PV,
Lever