
For experienced users only. Please follow the instructions carefully since changing the configuration of the GNSS receiver can affect the INS performance if done incorrectly.
For experienced users only. Please follow the instructions carefully since changing the configuration of the GNSS receiver can affect the INS performance if done incorrectly.
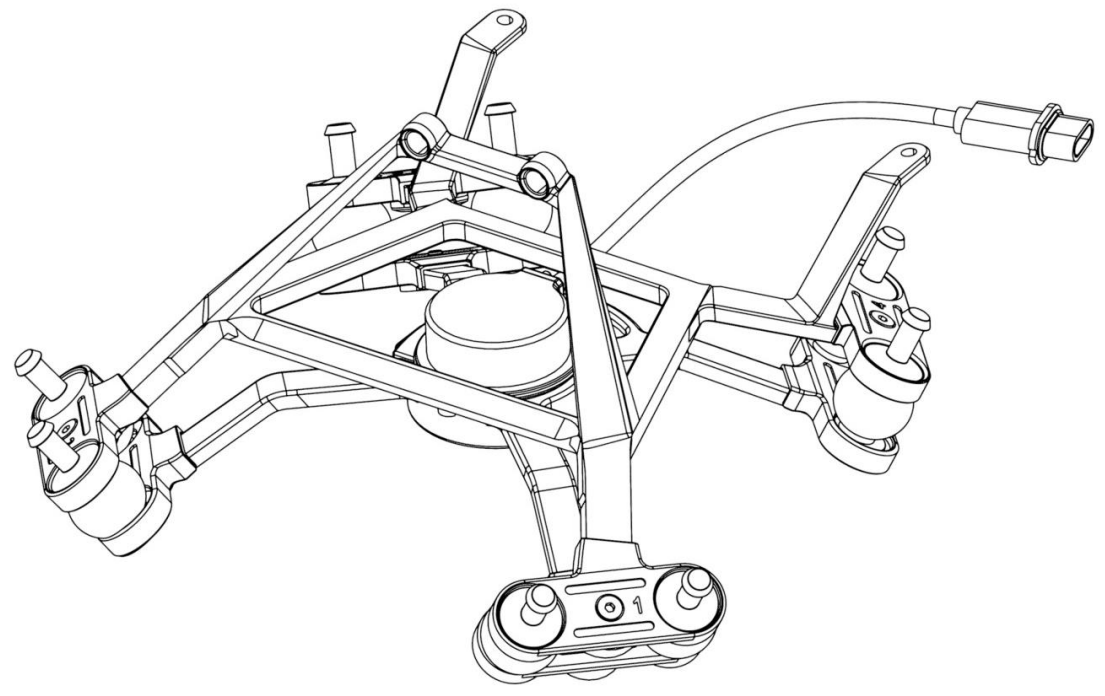
This article will help you to figure out how to install the dampening system on your M300.
Topics: Surveying, Remote Sensing, LiDAR, vibration, RESEPI
Purpose: To understand how to use RINEX data as base corrections when processing data with Inertial Labs RESEPI PCMaster software.
Topics: Correction, RESEPI, Base, RINEX
Purpose: To understand how to find your current firmware version and update the firmware to the latest firmware version (if needed).
Last Updated: May 2021
Periodically, the Inertial Labs support team will send out new firmware updates.
To see your current firmware version, look in the upper right portion of the interface if you are on desktop like shown below.
Purpose: To provide solutions for why the RESEPI GUI is not displaying the camera.
Last Updated: May 2021
Before a flight, it is best to check the “Status” page of the RESEPI web GUI where the user should note that the LiDAR and camera are present like shown below.
Purpose: To get a better understanding of the necessary distance between flight passes for your project.
Last Updated: May 2021
Firstly, it is important to note that the point density of a project is dependent on the following listed factors.
Purpose: To understand how to run the INS GUI software on Linux.
Last Updated: January 2021
Note: These instructions are only for the users using the INS GUI on Linux, not the regular INS GUI on Windows.
Purpose: To understand the different GNSS correction services that can be used to enhance the performance and precision of the INS-DU.
Last Updated: October 2020
There are 2 different categories of GNSS correction services. These categories are based on either the State Space Representation (SSR) or Observation State Representations (OSR) of the errors. Both categories solve the same problem, but each use different techniques, delivery mechanisms, and core technologies to do so. Both SSR and OSR correction services are used to mitigate key GNSS errors (i.e. orbits, biases, clocks, etc.) in order to enable high precision GNSS performance.
Purpose: Global Navigation Satellite Systems (GNSS) such as GPS or BeiDou can sometimes have confusing terminology. This knowledge base document will explain some of the most commonly used terms regrading GNSS
Last Updated: September 2020
Constellation: A constellation is the collection of satellites that make up a particular system. Some examples of constellations are: GPS, BeiDou, Galileo, and GLONASS.
Topics: Constellation, GPS, GNSS, BeiDou, GLONASS, Galileo, Signals, Frequencies, Correction
Purpose: To understand the grounding of an Inertial Labs device with a GNSS receiver and to understand the configuration of the TNC antenna cable shield.
Last Updated: July 2020
The shield of the TNC antenna cable is connected to the chassis of the device, and on the GNSS receiver this shield is connected to the power return potential. Since that is the case, the whole enclosure is under the same potential. We recommend users to isolate the chassis from the power return potential if it is required in their application, as we have not had any problems related to chassis isolation in any application.