Purpose: Answering common questions about applying external heading input; internal + external GNSS simultaneously; and sending RTCM corrections.
Last Updated: July 2019
Question: Does the INS support external heading input?
Purpose: Answering common questions about applying external heading input; internal + external GNSS simultaneously; and sending RTCM corrections.
Last Updated: July 2019
Question: Does the INS support external heading input?
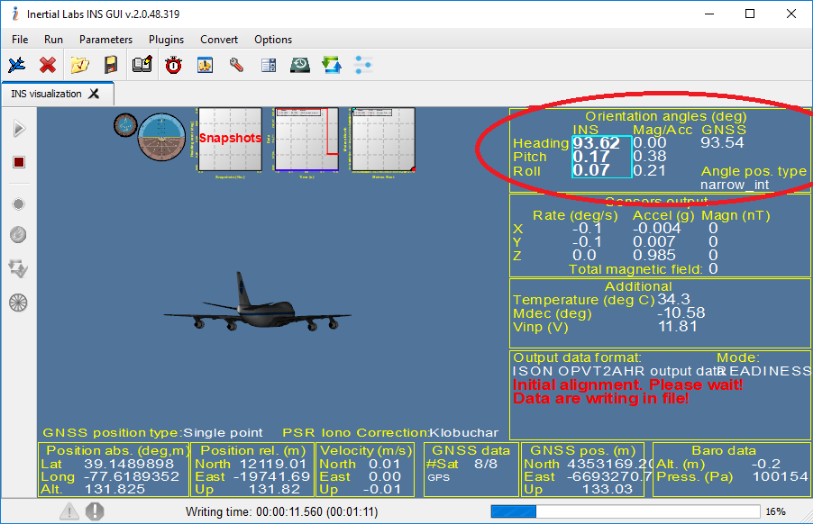
Purpose: To explain the orientation angles used for Inertial Labs devices and how they relate to one another.
Last Updated: August 2019
What's the difference and why does it matter?
Euler angles are generally what most people consider when they picture 3D space. Each value represents the rotation in degrees (it could technically be in any units) around one of the 3 axes in 3D space. Most of the time you will want to create angles using Euler angles because they are conceptually the easier to understand. The flaw is that Euler angles have a problem known as the gimbal lock that prevents certain rotations when two axes align. The solution: quaternions.
Topics: MRU, AHRS, IMU, INS, AHRS-II, Angles, Quaternion, Euler, Gimbal, Lock
Purpose: To provide insight into vibration dampening. This is only a recommendation by Inertial Labs. It is ultimately up to the user to decide for his/herself what the best solution is for their system.
Last Updated: October 2019
When using Inertial Measurement Units (IMU), vibration dampening is always a valuable concern. The reason for this is due to excess vibrations having the ability saturate data output streams from the Inertial Navigation System (INS).
Purpose: Diagnosing a common issue where the device is connect but heading as seen by device differs drastically compared to the GNSS heading.
Last Updated: July 2019
Common Issues:
1. The antennas are connected, but the heading of the INS starts with 0 (relative heading).
2. The INS heading differs a lot from the GNSS heading.
Purpose: To configure the output offset in GUI; internally known as configuring “PV measuring point relative to the IMU”. This feature is to be used if the user wishes to output IMU data from another set point on the system. A common example would have the INS/IMU sitting near the CG of a aerospace vehicle, and you wish to compute position data for a fixed point located on the wing.
Purpose: The purpose of this article is to show the steps to configuring usage of individual constellations, make sure to send these commands using an RS-232 connection and not to use Ethernet. It is critical that you follow these instructions carefully to not incorrectly configure the unit. If there is any uncertainty please consult a Customer Service agent. Developer options such as these may result in the Warranty of the device being voided.
Topics: INS, MRU-PD, INS-D, INS-DL, INS-B, INS-P, Constellation, GPS, Navic, QZSS, GNSS, custom, BeiDou, GLONASS, Galileo
Purpose: To provide clarity into known driver issue for Windows PC. This is a known issue for Inertial Labs products but unfortunately is at the fault of Windows. However, there is a solution.
Last Updated: October 2019
Issue: The root cause of this misbehaving mouse issue is that Windows immediately sees some data coming from a USB serial port when USB is connected, because unit is auto-started. Windows is known to treat this situation (traffic on a newly created serial port) as a serial mouse connected to that port. So, it captures the serial port with a serial mouse driver.
Topics: Issue, Control, Problem, USB, Serial, MRU, AHRS, IMU, Mouse, Computer, INS