Inertial Labs
Trailblazers in positioning, navigation solutions and orienting technologies for 20 years, Inertial Labs creates cutting-edge inertial solutions for air, land, and sea. Our team serves and consults with clients across every industry imaginable, solving today’s problems and planning for how we can unravel those of tomorrow. From commerce and industry to government, defense, and aerospace, Inertial Labs is at the forefront of developing and customizing products for exciting technologies that include Inertial Measuring, Magnetic Compensation, GNSS Tracking, LiDAR Scanning, Optical Image Processing, Acoustic, Ultra-wideband RF, and Celestial/Solar Compassing.
Deciding which drone LiDAR system to get is not easy, especially if it’s your first unit. Cost of a drone LiDAR package, although much lower today compared to just 18 months ago, still can get expensive. But cost should not be the only consideration, maybe not even the most important one. Performance should be carefully investigated, along with other key factors such as quality of manufacturing and post-sale support. Fortunately, all RESEPI systems use the same high-performance tactical-grade Inertial Measurement Unit (IMU) developed and manufactured by Inertial Labs, which is tested and calibrated at our headquarters in Virginia, USA. This allows for a streamline process that reduces costs and increases the quality of the product.
Our goal is to help you find the best product that meets or exceeds your requirements while fitting into your budget.
Read More
Topics:
Surveying,
UAV,
LiDAR,
Livox,
Avia
The Mission
Develop an autopilot platform capable of extended flight in a GNSS-denied environment for search and rescue missions.
The Resulting Product
We proudly announce the new Pixhawk 2.1 integration with Inertial Labs’ INS-P. Operating on the Ardupilot firmware, this complete open source autopilot solution can be fully customized for use across a wide variety of applications in addition to search and rescue adaptations.
Read More
Topics:
GPS Denied Navigation,
INS-P,
GNSS,
Development,
autonomy,
Pixhawk
Overview
Exploring our planet's oceans is a tradition that goes back centuries. Humans have an intrinsic curiosity that is fueled by a desire to learn about our surroundings. Motivated by this desire, we have continued to make advancements in marine navigation technology that has enabled us to explore the unknown reaches of the planet's waters. To accomplish this feat, our ancestors used the natural tools given to them like the stars. From there, celestial navigation developed and devices such as the gnomon, kamal, sea astrolabe, quadrant, cross-staff, and sextant were created. By increasing our ability to go further out into the unknown waters, these ancient navigation devices paved the way for marine navigation technology to develop. These developments, in turn, fostered inventions that were thought to be mere fantasy and allowed humans to grow in their understanding of the Earth. That unsatisfied curiosity continued to live in our hearts and minds leading up to 1957 when the first autonomous underwater vehicle (AUV) was developed by the applied physics laboratory at the University of Washington by Stan Murphy, Bob Francois, and Terry Ewart. The early AUVs were used for research purposes such as the study of underwater diffusion, acoustic transmission, and submarine wake.
Read More
Topics:
MRU,
IMU,
DVL,
autonomy,
#AUV,
maritime,
passive sonar
Autonomous Vehicles
Autonomous Vehicles have long been viewed as the logical next monumental breakthrough in engineering. A fantastical feat that has been depicted throughout Hollywood and analyzed by many journals; autonomous vehicles are one of the most highly scrutinized potential breakthroughs of this decade. There are 6 levels of autonomy which represent a progressive pathway to level 5 – full autonomy. So, this begs the questions: How long until we reach complete autonomy? What level of autonomy are we at now? And how is it accomplished? First, let’s get a clear picture of what each level of autonomy entails.
Read More
Topics:
GPS-Aided Navigation,
Remote Sensing,
INS-D,
Position,
PNT
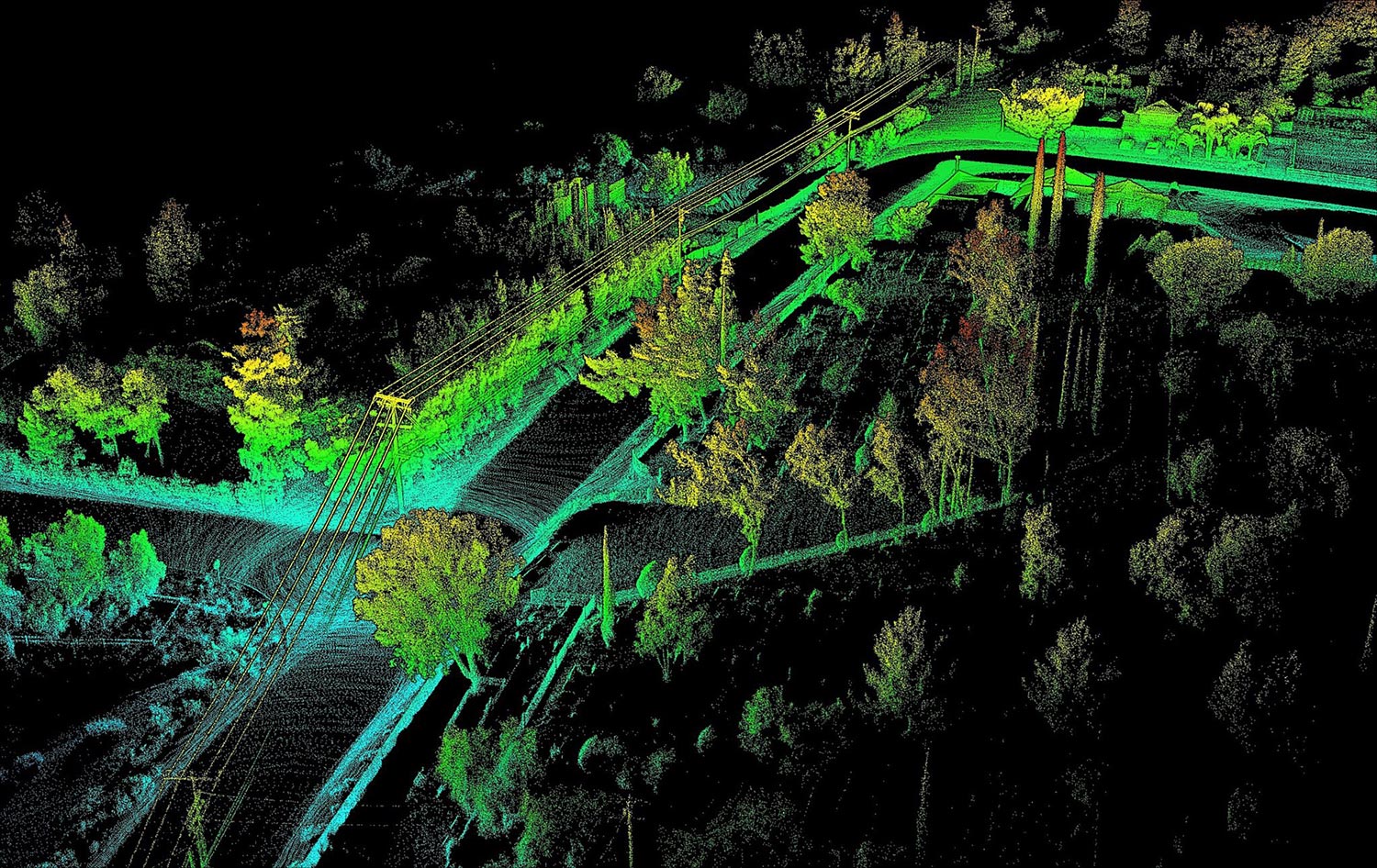
Introduction to Remote Sensing and Scanning
Light detection and ranging (LiDAR) sensors are a commonly used source of optical information for remote sensing payloads in scanning and surveying applications. LiDAR payloads use penetrating pulses of laser light that are reflected and used to determine relative distance to the point that it reflected from. When these pulses backscatter (reflect at an angle of 180 degrees), many payloads will use inertial navigation systems (INS) to timestamp and georeference data points that are acquired. Compiled together, these individual data points paired with point cloud software streamline the process for analyzing structures and ground planes.
Read More
Topics:
Remote Sensing,
LiDAR,
RESEPI