Aiding with Optics
The main limitation for many microelectromechanical (MEMS) based inertial measurement units (IMUs) is the realization that drift will always be a factor when left uncompensated for. In today's market many solutions have been developed using GNSS data, magnetics, or optical sensors.
Optical data, when fused with an IMU, is useful for both dynamic and static applications depending on the level of computer vision implemented into the system. By using the IMU as a reference for orientation, optical data can be used to mitigate drift of the gyroscopes.
Inertial Labs has been continuously developing next generation systems that can use a combination of day and night operation cameras to stabilize heading.
Sensor Fusion Filtering
So how does a complex system take into account multiple forms of data from different systems? By recognizing the best qualities of each source.
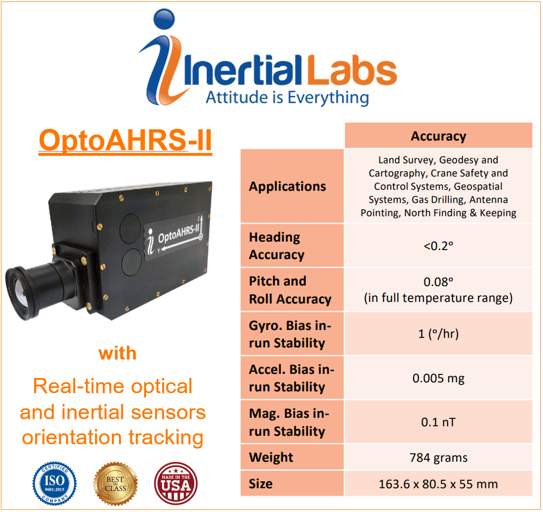
By themselves, each sensor in a complex system is vulnerable to many sources of error. For the OptoAHRS-II, the trick is to use a combination of sensors that each compliment the others weaknesses. For an IMU, drift of the gyroscopes is the biggest flaw; which is where optical data comes to the rescue. If the system can recognize that the frame of reference is not moving, then biases can be ignored, preventing the IMU from drifting in it's orientation calculations.
But what if you’re not in a static environment? Can optical data still be trusted? In short, the answer is yes, but the effort of computing power required for such calculations is much more than what many companies are willing to tackle.
This is where magnetometers become helpful: in an environment where there is not a large amount of magnetic interference.
By using the IMU to detect when an environment changes from static to dynamic, the Kalman filter can adjust and weigh the reliability of data from the different sensors based on the kind of dynamic environment the system is in.
Application Base
Indirect Fire Control Training
Many training facilities often require controlled simulations that demonstrate realistic conditions seen in the field. The OptoAHRS-II has been demonstrated to be an effective training solution for 60mm, 81mm, 105mm, and 120mm mortars.

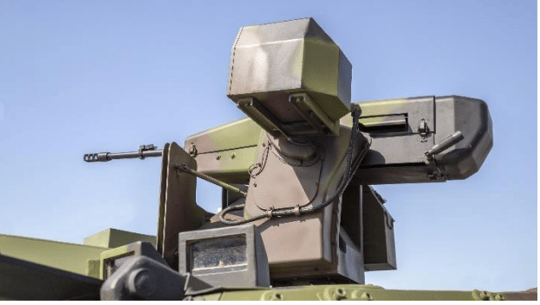
Antenna Pointing
Ideally used in environments where the need for a high pointing accuracy with low latency arises, the OptoAHRS-II stabilizes heading without requiring any GNSS receiver input. This makes it a great solution, especially in GNSS Denied environments.

Crane Orientation
As an industrial use-case, the OptoAHRS-II is perfectly suited for the construction zone where keeping a steady orientation is crucial; especially when safety is a priority.

Stabilization
For pan and tilt platforms with varying ranges of rotational velocities, the OptoAHRS-II can be configured to multiple gyroscope ranges to suit the need of the application. The two generic models of the OptoAHRS-II can stabilize platforms rotating at velocities up to 450 degrees per second and 950 degrees per second.
Our Customers

Trademark Legal Notice: All product names, logos, and brands are property of their respective owners. All company, product and service names used in this document are for identification purposes only. Use of names, logos, pictures and brands does not imply endorsement. Mentioned or referenced industries: Aselsan, EXPAL, U.S. Army, KWESST, and THALES are trademarks of its affiliates or its respective owners, registered in many jurisdictions worldwide
