 What is LiDAR Point Cloud?
What is LiDAR Point Cloud?
Components Overview
A LiDAR point cloud is a collection of millions (even billions) of points that is used to accurately map an environment in a way similarly to how a pointillism painting creates a picture. Each of these points have a location in a known coordinate system (local or global), along with a value for intensity which quantifies the amount of light energy that is recorded by the scanner. A LiDAR point cloud is the product of sensor fusion across a GPS-Aided Inertial Navigation System (INS) and a LiDAR scanner. Each sensor plays a critical role in how a LiDAR payload functions and the applicability of its point cloud output.
LiDAR Point Cloud (Left); Pointillism Painting (Right)
LiDAR Scanner
LiDAR stands for light detection and ranging, meaning that a LiDAR scanner uses light to determine the distance between two objects. Since the speed of light is a quantifiable value, the distance of an object is determined by the time it takes for light to reach the object, reflect off it, and return to the scanner. In the context of a mapping project, the LiDAR scanner emits 905 mm or 1505 mm wavelength lasers and calculates distances of points across the scanned area. That is the extent of the capabilities of a LiDAR scanner alone, a conglomerate of distance measurements without any concept of the space in which the payload is operating (calculates scalar but not vector). Therefore, the LiDAR is clearly just part of the solution, thus illustrating the need for additional sensors to produce a complete product.
GPS-Aided INS
A GPS-Aided INS is composed of an inertial measurement unit (IMU) containing three-axis accelerometers and gyroscopes, along with a GNSS receiver. After initial orientation and bias estimation, data from the IMU and GNSS receiver are fed through a robust Kalman filter algorithm, in which the unit will begin outputting valid and accurate orientation, position, velocity, and timing. In the scope of a LiDAR payload, the INS is important for accurate georeferencing of data. Georeferencing is the process of applying a coordinate system to the point cloud, so it can be accurately related to a geographic (or local) coordinate system. The GNSS receiver is responsible for obtaining a known global position of the rover in which the payload is mounted to. The IMU is correspondingly responsible for then taking that known position and transferring it to accurately georeference the acquired LiDAR data point. Add a datalogger, and this system now logs point clouds consisting of points that each have a location in space. The need for accurate georeferencing highlights the importance for a quality IMU, GNSS receiver, accurate boresighting (alignment of the LiDAR to the IMU), IMU-GNSS antenna offset calculation, and vehicle-payload rotation compensation. These are the critical components, and processes that if not carefully selected, calculated and compensated for, will result in an inaccurate point cloud.

Datums
As noted before, a LiDAR point cloud is a collection of points that have locations shown in a known 3D coordinate system. But how do we know that these data points are accurately georeferenced? Datums help us to properly georeference data by using an accurate model of the globe that is most suited for the area it was developed for. A datum is a reference frame, a visual and mathematical representation of the Earth or area that is used for precise location measurements on Earth. This is integral for applications like remote sensing and surveying whose data is based in spatial location. Traditional datums are divided into horizonal and vertical (orthometric) components. Horizontal datums are used to measure a location across Earth's surface in a coordinate system like latitude/longitude coordinates. Vertical datums measure the depth or elevation with respect to a reference origin, such as mean sea level (MSL).
Since the advent of GPS technology, datums can be derived with a reference ellipsoid. The most prominent of which is WGS84, which is a datum that is intended to be used internationally. Inertial Labs' georeferencing software outputs .las files in WGS84 for this precise reason. While many orthogonal datums can provide a more accurate representation of a specific area, WGS84 can provide a representation on a much larger scale. As a result, Inertial Labs' regional distributors can be confident that their Lidar Payload will map their environment with relatively high accuracy, regardless of where the surveying or scanning operation is being done.
Datum Conversions
A user can convert between datums using what is called a coordinate axis translation. Some differences in position values of datums can be so large that they are unacceptable for high-precision surveying. These differences are a result of different interpolations of the Earth resulting in differing reference ellipsoids, or differences in true north values as a result of differing north and South Pole positions. As a result, errors between datums are not evenly distributed and conversions cannot be done with just a simple parametric function.
Conversion Complications
A challenge comes when trying to transform ellipsoidal vertical datums to orthometric vertical datums. This conversion requires the use of a geoid height model, which is a conglomeration of ellipsoidal heights between an ellipsoidal datum and a geoid. As a result, the geoid height models are directly tied to the geoid and ellipsoid that define them. As shown below, the orthometric height is equal to the difference between the ellipsoidal height and the geoid height. 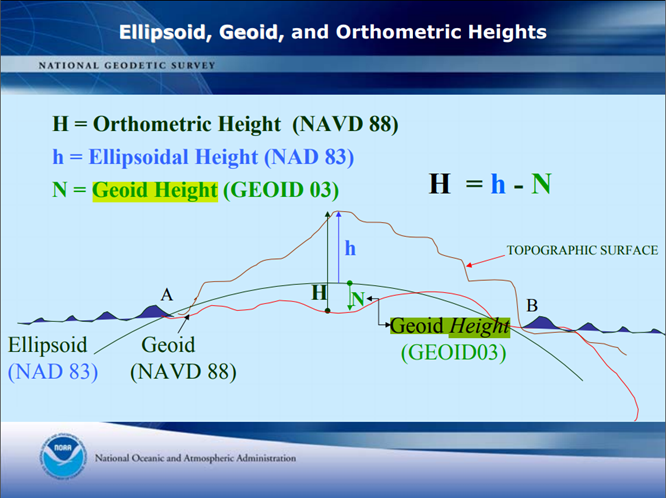
Projection Coordinate Frames and Systems
At this point, we have discussed what a geographic coordinate system is. It is a 3D coordinate system that is defined by a datum, or a reference frame, which is used to model the shape of the earth. But what's the difference between a geographic coordinate system (GCS) and a projected coordinate system (PCS)?
In summary:
- A GCS tells us where data is located on the earth's surface (3D);
- A PCS tells the data how to draw the data on a flat surface, like a paper map or a computer screen.
Unlike some geographic coordinate systems (GCS), projection coordinate systems (PCS) are defined on a flat, two-dimensional surface. This means that values such as lengths, areas, and angles will remain constant across the plane.
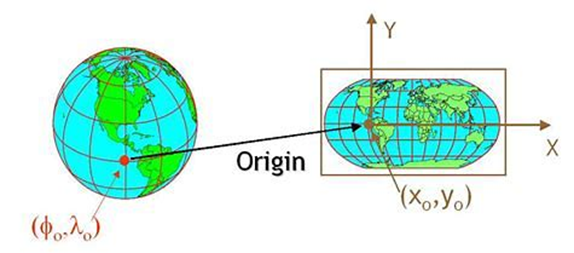
While they are defined on a flat surface, all projection coordinates systems are based on either a sphere or spheroid coordinate system. Locations in a projected coordinate system are given linear "x" and "y" values representing easting and northing coordinates on a consistent and evenly spaced grid of values as shown below.
The most common types of projections are conic, cylindrical, and planar. A projection is done by creating points or lines of contact, called points or lines of tangency. In the case of a planar projection, only one point of tangency is required. Tangential cones and cylinders contact the globe on a line. If the projection surface intersects through the globe, the resulting projection is a secant instead of a tangent. Lines of contact are important because they define locations that have no distortion. An example of this is the central meridian along with standard parallels called the standard lines. Distortion increases as you get further away from the line of contact.

A good example of this is the Universal Transverse Mercator (UTM) projection, which is used in Inertial Labs' PCMasterGL software. UTM is based on the cylindrical Transverse Mercator projection. The UTM projection of the transverse cylinder rotates in 6-degree longitude increments, which creates 60 strips called projection zones. Each of these 60 zones are projected onto a plane separately, as to minimize scale distortion in each zone. Since each of these zones are projected separately, they all have a central meridian extending north-south along the middle of the zone. Furthermore, these zones are divided into 8-degree latitude increments, resulting in 20 bands labeled with letters. So, with a few exemptions, the UTM zones are divided into "boxes" that are 6 degrees in longitude by 8 degrees in latitude. Each zone consists of a number followed by a letter to easily identify areas of the world corresponding to a zone. For example, Zone 32V covers the west coast of Norway.
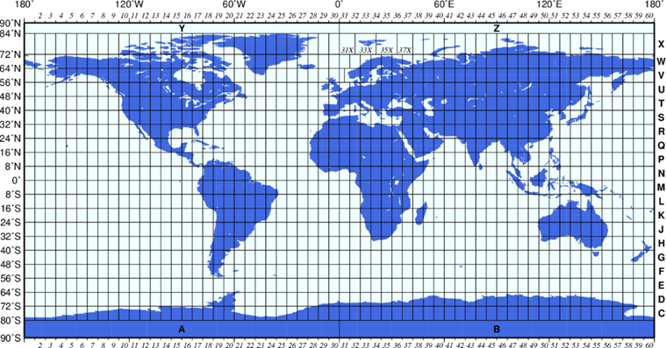
Example of a UTM Map
The Next Step, Analysis
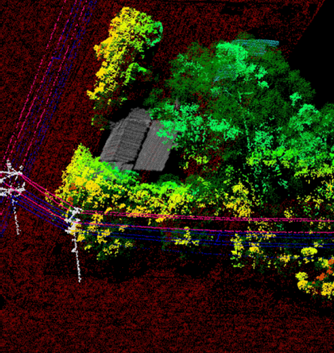
For many applications, one of the first steps in the post-processing of any point cloud is classifying points. Point classification is the process of identifying the type of object that the point is reflecting from. So, for instance, if a laser pulse is reflected off a tree, then the resultant point could be classified as vegetation. Point classification categories can be as broad as ground vs. non-ground, or it can be as specific as the type of structure/feature the laser pulse was reflected from. LiDAR processing software such make it easy for users to classify points as a variety of features.

Used for Communication Infrastructure, Vehicle Classification, Building Inspection, Vegetation Management.
Point classification algorithms group points together based off their spatial-based and echo-based features. A LiDAR point's spatial features consider the point's environment, height features, eigenvalue features, local plane features, plane slope, and more. Echo-based features such as terrain-echo, vegetation-echo, etc. are determined using the return pulse from the surface. The return number (first, second, last, etc.) also plays a role in determining a pulse's echo-based features. One or both of these features are integral in the accurate automatic classification of vegetation, buildings, and ground surfaces.
Point classification provides the foundation to create models such as DTM, DEM, and DSM. Point classification makes it easy to get only bare earth data for DEMs and DTMs, while also allowing for DSMs to be created by including points from man-made and natural features.
DTM, DSM, and DEM
A DTM provides a digital description of a surface with a set of heights over two-dimensional points on a reference surface. This reference surface can be an ellipsoidal, geoidal, or mean sea level height or a geodetic datum. These unique heights are a set of approximate values between these points and a reference surface. DTMs are only representative of the bare ground of the terrain and therefore do not measure heights of vegetation or man-made features. DTMs are often mathematically represented as 2D raster or matrix grids, irregularly distributed 2D points, 1D profiles, contours/lines of constant elevation, and Fourier series. DTMs can be used to calculate derived values such as volumes, slopes, contours, drainage, and gravitation attraction. Values like these are instrumental in the planning of roads, railways, drainage, inundations, and much more.
A DSM, similarly to a DTM, is a collection of points with different height values. The main difference between a DSM and a DTM is that a DSM is composed of more than just bare Earth heights, heights also come from natural and man-made features. This is especially useful in vegetation management applications as one can see where and to what extent vegetation is encroaching on a structure like a utility line. It is also useful in urban planning applications, as DSMs can determine how proposed buildings would obstruct the view of city residents.
A Digital Elevation Model (DEM) is a raster grid of the bare earth referenced to a vertical datum. DEMs only contain ground points and exclude man-made and natural structures. Formally derived from topographic maps, DEMs are increasingly becoming derived from high-resolution LiDAR. Since DEMs are a collection of ground points with varying height values, they are especially prevalent in hydrology in delineation of watersheds and calculation of flow direction and accumulation. DEMs are also helpful for analyzing terrain stability in high slope areas. This can provide valuable information for users that are looking to enact structures like highways or buildings in these areas.
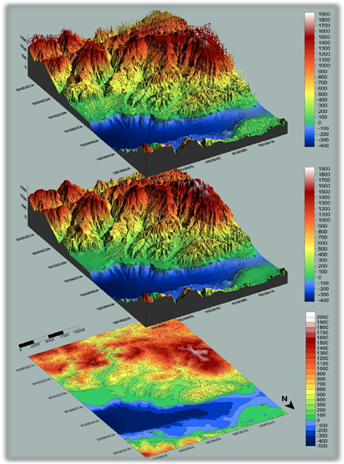
A digital terrain model, a digital surface model, and a digital elevation model (from top to bottom).
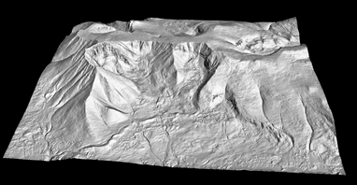
Contours
Since LiDAR data provides highly accurate height data for each of its points, users can create detailed contour maps. A contour map consists of multiple contour lines. Each line represents a line of equal elevation/height compared to a reference like mean sea level (MSL). As a result, a contour map allows us to see differences in elevation between successive contour lines. This in turn allows the user to view the vertical profile of the mapped environment.
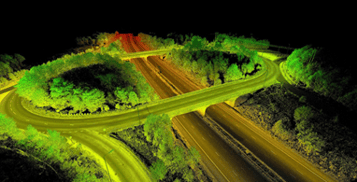
Tree and Forestry Analysis
With LiDAR's ability to penetrate vegetation with multiple return pulses, LiDAR point clouds are very useful in producing a 3D model of a forest, from the canopy, to the ground beneath it. This ability to visualize the forest canopy and the ground simultaneously is a huge advantage of LiDAR. In the past, land managers had to rely on topographic maps for ground classification and field surveys to obtain tree volumes and height information.
LiDAR Data and Post Processing of LiDAR Data allow users to obtain the following items:
- Digital Elevation Models (DEM)
- Tree heights and digital surface models
- Crown cover
- Forest structure
- Crown canopy cover
- Volume - Canopy geometric volume
- Biomass - Canopy cover
- Density – Height-scaled crown openness index and counts of delineated crowns
- Foliage projected cover – Crown dimensions
Using LiDAR data, forest inventories can be collected at the single tree level with an increased precision. LiDAR has typically been used in forestry to retrieve some basic structural attributes shown above such as tree height, canopy cover, and vertical profiles. These statistics can be in turn used to compute basal area, timber volume, biomass for alternative energy, and carbon sequestration analysis.
The vegetation management software takes 3D point clouds and rapidly analyzes them to find locations and measurements of vegetation encroaching on powerline assets. This data can be communicated as a classified LAS point cloud, map icons, or SHP files.
How RESEPI Can Transform Your Business
Construction
 Point clouds and subsequent models generated from RESEPI can be used to aid construction projects by providing information, analysis, and aiding in creating simulations when developing a project. This information can be used to determine repair and maintenance requirements for every project. With LiDAR's capability of producing multiple return data, RESEPI has the ability to penetrate vegetation and get ground points, even in covered areas. With this in mind, construction companies can plan ahead by retrieving a terrain map of a construction site even in overgrown environments.
Point clouds and subsequent models generated from RESEPI can be used to aid construction projects by providing information, analysis, and aiding in creating simulations when developing a project. This information can be used to determine repair and maintenance requirements for every project. With LiDAR's capability of producing multiple return data, RESEPI has the ability to penetrate vegetation and get ground points, even in covered areas. With this in mind, construction companies can plan ahead by retrieving a terrain map of a construction site even in overgrown environments.
 Bare earth models or DTMs are instrumental for the planning stage of a construction project. Bare earth models derived from Lidar data allow construction planners to assess land stability by removing natural and manmade aboveground structures. Users can consider the risk of landslides and flooding by analyzing slope gradients.
Bare earth models or DTMs are instrumental for the planning stage of a construction project. Bare earth models derived from Lidar data allow construction planners to assess land stability by removing natural and manmade aboveground structures. Users can consider the risk of landslides and flooding by analyzing slope gradients.
Utilities
Required by law, regular inspections significantly reduce the frequency of power outages and provide valuable data to prevent fires caused by faulty overhead utility lines. Traditionally, utility lines have been inspected using on-the-ground methods that often prove to be labor-intensive and require surveyors to be physically present along the length of the utility network. Drone-based LiDAR systems can quickly map large utility networks and can access areas with difficult terrain. Point cloud post-processing provides meaningful geospatial data, like measuring the distance between the transmission line and any vegetation. This is a much easier alternative to calculating distances with heavy measuring rods and theodolites.
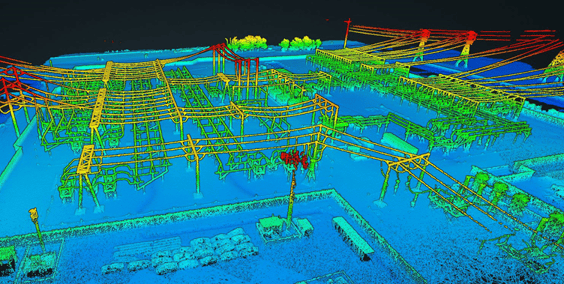
Utility Station Point Cloud
Conclusion
In summation, data collected by LiDAR can provide valuable metrics for a wide variety of applications. From topographic mapping, to asset inspection, to site monitoring, the Inertial Labs RESEPI is a quick and efficient way to generate models of an environment. Beyond just making a nice looking 3d model, LiDAR can provide actionable data that provides immediate value to any inspection or mapping service. With the advances in modern LiDAR data, data can be displayed in a way that is almost identical to how it appears in reality and provides comparable accuracy to field surveys. With the ability to perform customized analysis in line with the priorities and risks of an application, owners have the power of understanding what needs to be done. With custom options and a great price-performance ratio, Inertial Labs is working hard to provide high-quality solutions for a variety of applications at an affordable price.
 What Do You Think?
What Do You Think?
Here at Inertial Labs, we care about our customers' satisfaction and want to continuously be able to provide solutions that are specifically tailored to problems that are occurring today, while vigorously developing products to tackle the problems of tomorrow. Your opinion is always important to us! Whether you are a student, an entrepreneur, or an industry heavyweight. Share your thoughts on our products, recommendations you have, or just say hello at opinions@inertiallabs.com.