
Understanding The Magnetometer
Magnetometers measure the direction, strength, or relative change of a magnetic field at a particular location. (1) Though phonetically complex, magnetometers can be common devices used in everyday life such as compasses and metal detectors. In general, there are two basic types of survey magnetometers: vector and scalar magnetometers. Vector magnetometers measure magnitude and direction of a magnetic field. Alternatively, scalar magnetometers measure the absolute or vector magnetic field, using an internal calibration or known physical constants of the magnetic sensor.
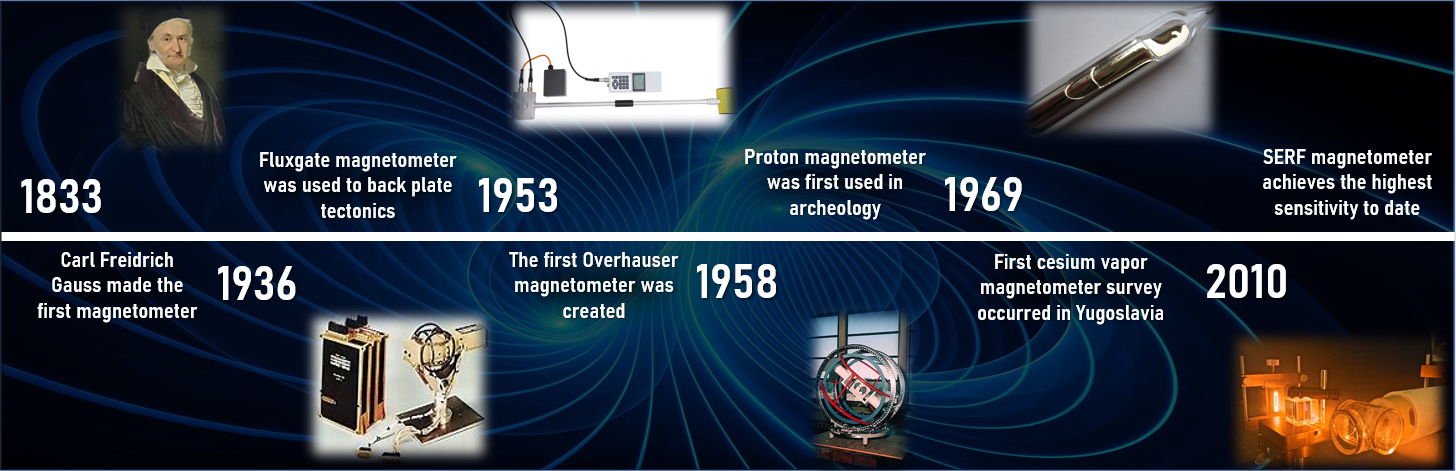
Early Magnetometer Technologies
In 1833, Carl Gauss published a paper on the measurement of Earth's magnetic field. In this paper, Gauss described an instrument that consisted of a permanent bar magnet suspended horizontally. The difference in the oscillations of when the bar was magnetized and when it was demagnetized allowed Gauss to calculate the absolute value of the strength of Earth's magnetic field. This discovery resulted in the units for magnetic flux density in the centimeter-gram-second (CGS-EMU) unit system being named after him. (2)
13 years later, Francis Ronalds and Charles Brooke independently invented magnetographs in 1846, which recorded a magnet's movement using photography. Since then, many variations of magnetometers have been invented and have contributed to a wide variety of scientific discoveries. For instance, as referenced below, the fluxgate magnetometer was invented in 1936 in order to detect submarines and was a key contributor in backing the theory of plate tectonics.
Magnetometers' Role in Inertial Navigation System (INS)

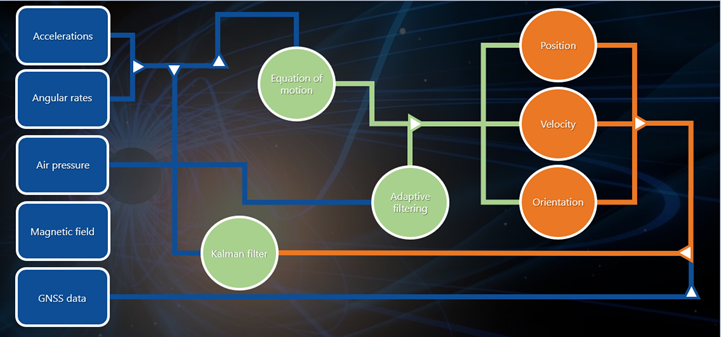
Inertial Labs’ magnetometers measure the strength and direction of the magnetic field that the INS is passing through. Inertial sensors can only detect changes from one state to another, so the device must be calibrated considering it's normal operating conditions for magnetic interference. (3) At Inertial Labs, we use a gyro-compensated three axis fluxgate magnetometer to provide the heading angle for robots, UAVs, missiles, and more. Magnetometers, along with other sensors that are integrated in a Kalman filter, improve the attitude and position accuracy of the system. As a result, magnetometers can be used for aiding course correction in GPS-denied environments for the INS in Unmanned Ground Vehicles (UGVs). The graphic below shows the flow of information from initial sensor inputs to position, velocity, and orientation outputs.
Applications
Construction Safety & Inspection
LiDAR is a method of mapping terrain using laser technology, which is very effective when used via drone. (4) These LiDAR equipped drones can fly over a construction site and map the terrain. Once the mapping data has been collected, it can then be processed to produce a full 3D model of the current terrain. LiDAR used in drones, as opposed to other methods, is especially effective as drones are an unmanned safe option of terrain mapping. Under GNSS-denied conditions, drone LiDAR systems require magnetometers to provide aiding data.
At the beginning of a construction project, it is necessary to perform a survey to determine if the land needs to altered and leveled. LiDAR inspection can accurately map the site and can be used to accurately plan construction projects. In addition, regular inspections can be used to identify safety issues and potential hazards. This is a safer and more effective way of inspection, especially when compared to manual inspection. When GNSS signal is not available, magnetometers play a key role in aiding the navigation of these unmanned systems and help to keep construction sites safe regardless of the GNSS conditions.

Indirect Georeferencing
Indirect georeferencing is an especially prevalent example of magnetometers’ roles in modern industry. Using ground control points (GCPs) to support aero-triangulation (AT), Indirect Georeferencing produces positional accuracies within a few centimeters. (5) Though this is a time-consuming process, indirect georeferencing can obtain higher accuracy than data collected through direct georeferencing or post-processed kinematic (PPK) methods. The Inertial Labs miniAHRS, with an embedded fluxgate magnetometer, provides accurate orientation data for indirect georeferencing systems at a cost-efficient price point. As a result, users can accurately survey environments with supreme confidence in the system's heading, pitch and roll data.

GNSS-Denied Navigation
For unmanned or autonomously navigated vehicles in land, marine, and aerial applications, magnetometers are pivotal instruments in GNSS-denied environments. When a vehicle's GNSS receiver is not transmitting received signals from satellites, the magnetometer is necessary to provide accurate heading. The Inertial Labs INS-P seamlessly produces accurate GNSS-denied navigation by fusing data from accelerometers, gyroscopes, and magnetometers. This data is fused in Inertial Labs' robust Kalman filter to provide precise measurements of orientation and linear acceleration. GNSS signal loss is becoming increasingly prevalent as infrastructure is made for high population areas. As a result of high population density, there has been an increase in underground passages, high-rises, and high-density living arrangements, and all these structures can cause signal loss. (6)

Military
There are a wide range of military applications for magnetometers, as magnetometers are necessary in land, air and marine systems. For instance, navies use arrays of magnetometers laid across the sea floor in order to monitor submarine activity. Conversely, fluxgate magnetometers are used in submarines to orient each sonar node so it can accurately triangulate ships. Additionally, magnetometers provide aiding data for loitering munition drones when waiting for commands to make a strike on a target.
Magnetometer Calibration Methods
Overview
Our team at Inertial Labs has comprised an extensive array of magnetometer calibration methods. Each calibration is designed for specific applications requiring different pitch and roll ranges or defined calibration environments. We pride ourselves in our ability to provide comprehensive, time-efficient, and accurate calibrations for any application.
3D Calibration
The 3D calibration is designed for carrier objects in aerial or marine environments that can operate in full heading, pitch and roll ranges. A possible application using this type of calibration method is bathymetric surveillance. During the INS data accumulation, the object should be rotated in full azimuth, pitch and roll ranges. Once a full 360 degrees rotation is achieved, the system containing the INS is turned over and the same procedure is repeated. During this calibration method, it is important to change the range of pitch and roll angles as much as possible. After the calculation of the calibration parameters, the INS will give out a message detailing the calibration results.
2D-2T Calibration
2D-2T calibration is designed for applications where systems need to operate in full azimuth range but with limited range of pitch and roll angles such as indirect fire control. This calibration procedure involves a few full 360-degree rotations of the carrier object in azimuth. These rotations should happen with different pitch and roll angles. The INS calculates the check sum of the received parameters and returns it for checking. It will then immediately display a message where payload is the calculated check sum. 2D-2T calibration includes initial alignment, a 30 second process in which the user must keep the INS entirely still. This process includes gyro bias estimation, and if the unit is moved during the initial alignment, large errors in orientation could occur.
2D Calibration
The 2D calibration is designed for carrier objects that operate in full azimuth range but with small pitch and roll angles (not more than a few degrees) such as land vehicle applications. This calibration requires full 360-degree rotations of the carrier object in azimuth. During the rotation, pitch and roll angles must be as close to 0 as possible. 2D calibration calculates check sum of the received parameters and has the same initial alignment process as that of 2D-2T calibration. After initial alignment, the unit must be rotated 360 degrees at least one more time to calculate calibration parameters.
VG3D Calibration/On-the-Fly Calibration
The VG3D calibration is designed for carrier objects that can operate in full heading, pitch and roll ranges like that of drone payloads. During INS data accumulation, the object should be rotated in full azimuth range and maximum possible pitch and roll ranges. On-the-fly VG3D calibration allows for calibration of the INS unit during ordinary operation without the interruption of INS navigation data calculation and output. On-the-fly calibration requires the aerial device to perform two full 360 degree coordinated turns in a figure-eight pattern. This is done to rotate the object in full azimuth range with maximum possible pitch and roll angles.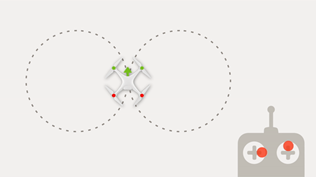
Conclusion
A technology that has been utilized and innovated upon for nearly 200 years; magnetometers continue to be a reliable asset for navigation systems. Even with the advent of GNSS technology, magnetometers have yet to be considered antiquated as specific applications rely heavily on a magnetometer's reliable north reference. From the previous magnetometer calibration methods mentioned, it is evident that Inertial Labs provides a wide variety of calibration methods for a plethora of applications. This collection of methods, along with a clear and concise ICD, makes it simple for the user to find the right type of calibration method for their application. Once a method is chosen, our documentation provides a detailed explanation of the different processes that are required in each method. If the user has any more questions about what calibration method is right for them or how to perform the methods accurately, our expansive knowledge base along with our dedicated and knowledgeable customer support team will guide the user down the correct path.
Trademark Legal Notice: All product names, logos, and brands are property of their respective owners. All company, product and service names used in this document are for identification purposes only. Use of names, logos, pictures and brands does not imply endorsement. All companies discussed are trademarks of its affiliates or its respective owners, registered in many jurisdictions worldwide.