
 Aerial Photogrammetry
Aerial Photogrammetry
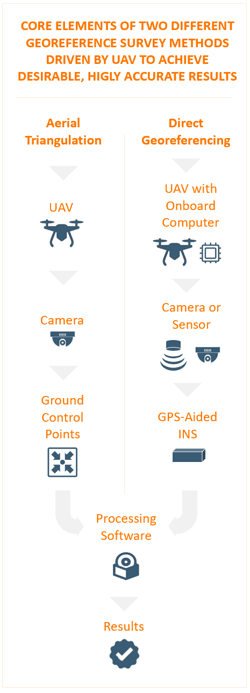
Aerial Photogrammetric analysis may be applied to a single image or high-speed imagery and remote sensing to detect, measure and record complex 3D motion fields. This is done by feeding measurements and image analysis into computational models that estimate the relative motions and positions with increasing accuracy. While in its early days it was used mostly for topographic mapping, it’s application base has recently expanded into numerous industries. Modern sensors and software capabilities allow for the creation of precise 3D renderings and point cloud generation which is widely used in industries such as Filming, Sports, Game Development, Agriculture, Real Estate, Forensics, Land Surveying, and in Civil or Architectural Engineering. For these different applications, two methods of photogrammetry are used in practice today, Aerial Triangulation (AT), and a more modern approach, Direct Georeferencing.
Aerial Triangulation
Aerial Triangulation is the process of optimally piecing together a block of overlapping aerial images so that you can make a map. The objective is to determine the position and orientation of each image in a mapping frame. This is done by using Exterior Orientation (EO) parameters. Once these parameters are acquired, you can measure relative positions and locations of ground objects. Conventionally, AT uses Ground Control Points (GCPs) which provides reliable position data but at the cost of the geometrical accuracy depending on the quantity of GCPs used and their spatial layout configuration. This puts constraints on time management for projects and limits the cost effectiveness.
Direct Georeferencing
Similarly, Direct Georeferencing uses a high-grade Inertial Measurement Units (IMUs) and an optional Global Navigation Satellite System (GNSS) receiver and as a result provides absolute orientation to a continuous ground reference with high level of accuracy. Such aerial surveillance allows for minimized efforts in data collection for a larger landscape and access to surveying a location where GCPs are not deployable. During all this, it also ensures that time and finances after initial investment are not wasted.
 Limitations of Aerial Triangulation with GCPs
Limitations of Aerial Triangulation with GCPs
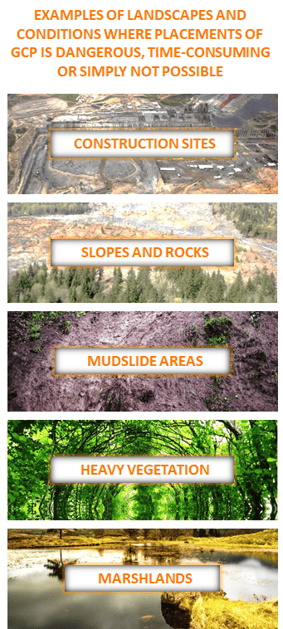
GCPs are used to help relocate images into local coordinate systems. Even though at first sight GCPs may seem to be a cheaper option, in the long run they are limited in their usability and create a tremendous amount of extra work. Installing and maintaining GCPs around a very small plot of land may be a job worth tackling, but when it comes to a larger or complex landscapes where manual installation of GCPs is nearly impossible, an alternative method becomes desirable.
Tedious routines for pre-surveying, can heavily tap into your budget:
With GCPs, generally every survey is preceded by laborious preparation. The steps for this method of surveying are as follows: First GCPs get installed throughout a field/landscape evenly; then a professional surveyor (or you can purchase equipment to do it yourself) will identify the exact location of every GCP by using a precision GNSS receiver with antenna(s) to save coordinates for processing data; finally, only then a surveying flight can begin to create mappings using known positions. Setting up GCPs every survey in some cases is quite time consuming and may even be dangerous. In cases when GCPs are installed permanently, extra maintenance is required because unsupervised GCPs may get blocked by a growing plant or moved from its location due to wind or curious wildlife, which would cause need for another surveying expense. Either way it is additional manpower that must be invested on a continual basis.

Apparent cost savings may turn out to be more expensive than you thought:
A high-end set of GCPs to survey a landscape may total up to be several thousand US dollars. Build them yourself, and unless your GCPs have embedded GNSS receivers, you’ll consistently be re-coordinating the locations prior to every survey for consistent accuracy. Either way that adds up to quite an expense in time and effort. In the long-run such approach may make an alternative method requiring much less effort more appealing. By using an all in one product like a GPS-Aided INS you avoid the hustle with GCPs once and for all.
Direct Georeferencing with GPS-Aided INS
Direct Georeferencing with a GPS-Aided INS is a technique used for aerial photogrammetry when traditional methods simply aren’t efficient enough for the application. Unmanned Aerial Vehicles (UAVs) often use a GPS-Aided INS with aiding data from a high-resolution camera/laser to accurately capture and map the Earth’s surface. For Inertial Labs these GPS-Aided INS’s include features like:
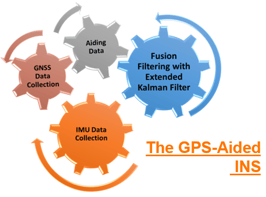
- Embedded GNSS receiver, with up to 1 cm + 1 ppm RTK position accuracy
- Powerful Magnetometers with correcting data from high-grade Gyroscopes (1 deg/hr bias in-run stability) to provide 0.05 deg GNSS Heading and <0.4 deg Free-inertial Heading accuracy (3 sigma)
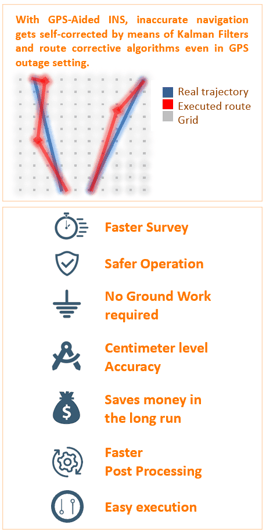
- Powerful self-correcting algorithms, such as an advanced Kalman filter for precise navigational and orientational computations
These fundamental features are vital for consistent accuracy when using Direct Georeferencing for aerial photogrammetry and digital surface model creation.
Faster Data Processing with GPS-Aided INS
In the long run Direct Georeferencing with GPS Aided-INS is the most pragmatic approach to aerial photogrammetry. With the time savings and ease of operation, the up front start up costs pay for themselves by allowing you to focus your time on what matters, the results. For applications where time data processing is time sensitive, Direct Georeferencing with a GPS-Aided INS has another advantage. Data acquired by UAV when using a GPS-Aided INS equipped UAV is processed faster than similar data using a GCP approach. This is because the GCP approach must stitch together layers of data using the known positions of only the GCPs with aided imagery. When using a GPS-Aided INS however, position is consistently being monitored in real time allowing for faster processing times between images and positions.
Standalone Solution: INS-B
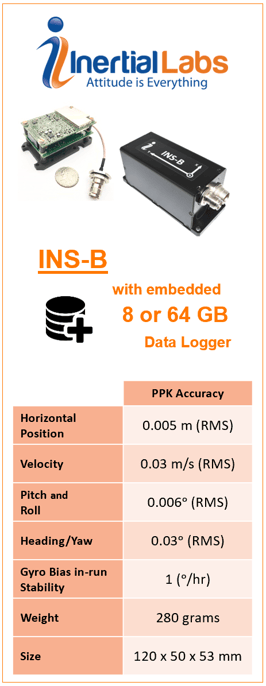
The Inertial Labs GPS-Aided INS-B is new generation of: fully-integrated; combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation; and high-performance strap down system that determines Position, Velocity, Pitch, Roll and Yaw with high accuracy for both motionless and dynamic applications. It utilizes an advanced single antenna GNSS receiver, barometer, 3-axes each of calibrated in full operational temperature range precision Accelerometers and Gyroscopes. Its also armored with a sensors fusion filter, state of the art navigation algorithms and calibration software. The INS-B can even be used as aiding data for optical cameras, autopilot or Light Detection and Ranging (LiDAR) payloads to further help with taking your application to the next level.
The Value of Investment
Depending on the application and factors of the project there are two main approaches to producing mappable results. Direction Georeferencing using the Inertial Labs INS-B provides a solution that mitigates ground work, reduces risk, and produces faster results that are consistently accurate. For alternative results acquired using GCP’s, potential money saved on startup costs may come at an expense in the long run in continual maintenance, and repeated expenses. For professionals that frequently perform routine operations, a GPS-Aided INS-B is the logical choice for its ease of data acquisition, speed of processing, and accuracy. Time is money; and in an industry where maximizing your ability to automate unnecessary work comes with heavy benefits, why not take that next step? By doing this, it allows human resources to be focused on the things that can’t be automated like interpreting results and building a larger customer platform.
Trademark Legal Notice: All product names, logos, and brands are property of their respective owners. All company, product and service names used in this document are for identification purposes only. Use of names, logos, pictures and brands does not imply endorsement. Mentioned or referenced industries are trademarks of its affiliates or its respective owners, registered in many jurisdictions worldwide.