
Value Added AHRS
Since its first release, the Inertial Labs Attitude and Heading Reference System (AHRS) has continued to develop and improve in its performance as well as its integration abilities. The newest addition, the AHRS-II-P, is a compact, lightweight, and affordable solution both as a standalone reference unit or a solution where applications involving the integration of an external compass or GNSS receiver may be needed to improve an existing system. Although the AHRS-II-P comes standard with an embedded fluxgate magnetometer to determine accurate Heading, input is supported for an external magnetic compass to increase static and dynamic accuracy. The AHRS-II-P offers advantages over its competitors present on the market by recording and transmitting very accurate Heading, Pitch and Roll; a very appealing choice for applications involving motion control such as UAV’s, aircrafts, ships, or robotic devices.
Aside from the ability to be easily integrated with existing systems, the AHRS-II-P makes field calibrations easier than ever before. After the ARHS-II-P is mounted onto it’s carrier base, a quick calibration procedure is performed and the device is ready to go. Among the many ways to perform these calibrations procedures, the most mention worthy is the Inertial Labs option for an ‘On-the-Fly’ calibration.
Now the AHRS Supports Data Input from External GNSS Receivers
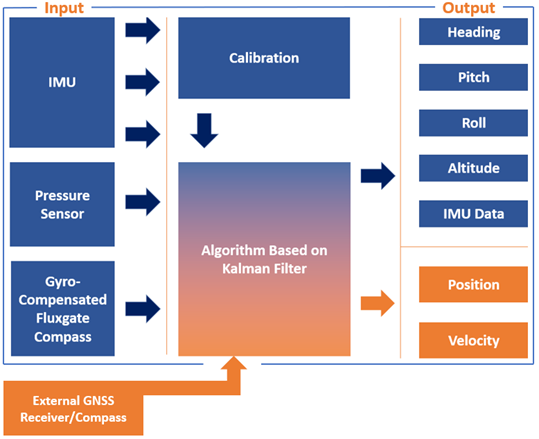
Inertial Labs is eager to present a recently implemented feature of the AHRS-II-P; the ability to utilize data from an external single or dual antenna Global Navigation Satellite System (GNSS) receiver for position and velocity calculations and corrections. By adding this ability, the AHRS-II-P expands its applicability and appeals to a larger number of potential use cases. Besides improving stable Heading course, it increases accuracy of orientation calculations during maneuvers and positively affects dynamic accuracy overall. In addition, AHRS-II-P calculations and data outputs get synchronized with the respective clocks on the GNSS, which is by default much more accurate than internal system clocks. The standard unit utilizes powerful magnetometers to correct Heading, but by having GNSS data on top of that opens up the possibility to determine Heading even more accurately by course over ground tracking. The functional diagram on the right shows the flow of data for the AHRS-II-P utilizing an external receiver.
Functional Diagram of the Inertial Labs AHRS-II-P with External Inputs
Here is A cost and functional comparison of the AHRS-II-P, AHRS-II-P with external GNSS receiver, and similar product from a competitor. We understand that for every application there is a certain set of requirements. Inertial Labs is working hard to build a perfect solution for every application while also ensuring the customer does not overpay. As you may see from the table, an external GNSS receiver alone would add several critical states of a system to output. This in turn would cover a wider variety of applications while as you can see, still can stay at a competitive price when compared to one of its market's competitors.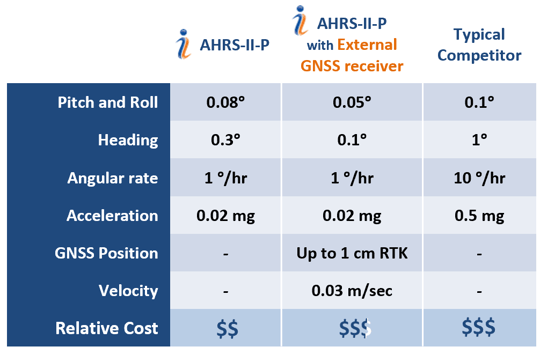
At Inertial Labs we aim to give customers an affordable, complete, and comprehensive solution by ensuring all customer requirements, including performance, come first, without cutting corners for quality.
Showcase Feature: On-the-Fly Calibration
The AHRS-II-P supports five types of hard and soft iron calibrations: 3D calibration, 2D-2T calibration, 2D calibration, VG3D calibration, and the new showcase method – ‘On-the-Fly’ VG3D calibration. This calibration method is designed for applications where pitch and roll angles are limited. A common application need for this method lies with drone users. When ground calibration is too difficult to perform, the drone can take off and perform the calibration maneuver manually in flight to begin the calibration process, all the while real time data acquisition functions like autopilot still work seamlessly. This ‘On-the-Fly’ method allows full calibration to take place while a unit is in its normal operational mode without any interruption of the unit's orientation calculations or data outputs. Upon receiving a calibration start command, the AHRS-II-P starts gathering magnetometer data, at this time the carrier object must perform a maneuver, rotating twice in full azimuth range with maximum possible pitch and roll ranges.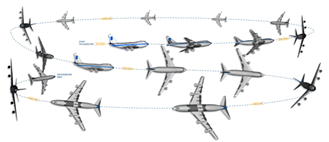
An example of this maneuver can be seen in the image above. In this figure, an airplane performs at least two full 360° coordinated turns, once towards each of the sides (to the right and then to the left) with maximum roll angles. Once this maneuver has been made, the AHRS-II-P starts the VG3D calibration calculation. Newly calibrated parameters are then applied to the AHRS-II-P magnetometer data flow stream and the unit compensates immediately. During all steps of ‘On-the-Fly’ VG3D calibration, the AHRS-II-P unit continues operational calculations and the outputting of orientation data.
Test Results of the AHRS-II-P with External GNSS Input
For this test procedure, the Inertial Labs AHRS-II-P was mounted to the floor of a test vehicle. The external GNSS receiver was mounted to the ceiling, and the respective antenna was mounted on the roof of the vehicle. The test duration was approximately 25 minutes long, and was performed at an average speed of 25 mph (11.18 m/s) in the suburban area shown in the picture below.

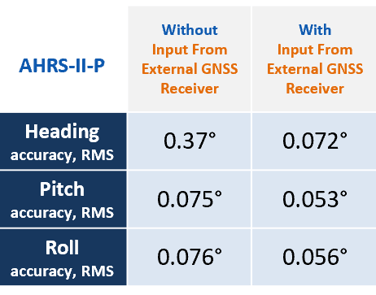
Values displayed below in the table are the errors which have been determined by comparing the real time results of the data acquired during the test and the post-processed data captured by a simultaneously run reference device. This reference device combines SPAN technology from NovAtel and a Ring Laser Gyro based IMU, the HG1700, from Honeywell. Together this ground reference provides immaculate RTK performance to use as a platform for analyzing sensor reliability.
Test Results of real time readings from AHRS-II-P with and without an external GNSS receiver:
Recommendations on External GNSS Receivers
Connecting an external GNSS receiver to the AHRS-II-P requires a COM port with an RS-232/RS-422 interface. For even better performance, use an external receiver with PPS output for timestamp synchronization. When choosing a GNSS receiver it is important to be mindful of the correction services that are offered for that product. NovAtel offers different platforms, such as TerraStar, for which to get GNSS corrections from. By using a global network of reference stations and advanced algorithms TerraStar correction services are able to provide outstanding position accuracy for most any application. Combining the services from TerraStar that NovAtel offers with the advanced Kalman filter algorithms inside products like the Inertial Labs AHRS-II-P, and you can achieve post-processed position accuracy down to 0.005 meters.
Specifications of Position for Recommended NovAtel GNSS Receiver*
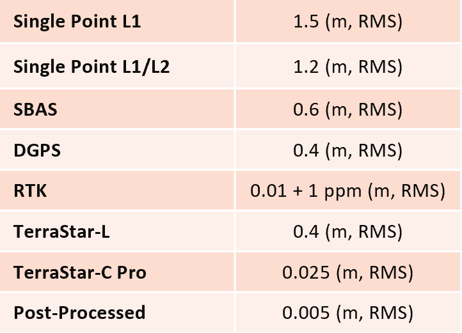
* Specifications listed are for unprocessed horizontal positioning
The Smart Decision
When it comes to choosing what model needs to be selected and integrated into a whole solution, it’s imperative for businesses to stay within the most efficient Return of Investment (ROI). When investigating an investment into the proper AHRS unit, a thorough analysis of what pieces of data are required for your application is crucial. For example, if all the application requires is orientation (pitch, roll, and Heading/yaw), then the AHRS may provide an inexpensive solution. In cases where additional parameters are needed such as precise position coordinates, and velocity; then a potential solution may require the use of an Inertial Labs AHRS-II-P with extended capabilities, or GPS-Aided INS. Every application has a product with a perfect fit, and we’ll find it for you, guaranteed.


AHRS-II-P
The Inertial Labs AHRS-II-P is the next generation of enhanced, high-performance, strap down systems that determines absolute orientation (Heading, Pitch, and Roll) for any device on which it is mounted on. Orientation gets determined with high accuracy for static or dynamic bases. The Inertial Labs AHRS-II-P utilizes Tactical-grade IMU (Gyro bias in-run stability of 1ᵒ/hr): 3-axes of precision accelerometers & gyroscopes each, and Ultra high-precision gyro-compensated, Fluxgate Compass. Integration of gyroscopes’ output provides high frequency, real-time measurement readings. IMU and Fluxgate magnetometer measure absolute Pitch, Roll and magnetic Azimuth at initial alignment as well as apply ongoing corrections to gyroscopes during operation.
 What Do You Think?
What Do You Think?
Here at Inertial Labs, we care about our customers satisfaction and want to continuously be able to provide solutions that are specifically tailored to problems that are occurring today, while vigorously developing products to tackle the problems of tomorrow. Your opinion is always important to us! Whether you are a student, an entrepreneur, or an industry heavyweight. Share your thoughts on our products, recommendations you have, or just say hello at opinions@inertiallabs.com.
Trademark Legal Notice: All product names, logos, and brands are property of their respective owners. All company, product and service names used in this document are for identification purposes only. Use of names, logos, pictures, units and brands does not imply endorsement. SPAN, NovAtel, Honeywell and TerraStar are trademarks of its affiliates or its respective owners, registered in many jurisdictions worldwide.
