Last Updated: February 2020
Purpose: To highlight the benefits and limitations of using aiding data for the Inertial Labs Inertial Navigation System (INS).
Introduction:
The purpose of this article is to explain the benefits of using aiding data when operating an Inertial Labs Inertial Navigation System. For many applications, there is knowledge of position, orientation, or velocities that could be valuable during periods of GNSS outage. This additional information can be delivered to the Inertial Labs Kalman Filter and provide extended operation when other aiding data is not available. Unfortunately, the lack in understanding of how to use this data to benefit the user creates a lost opportunity for higher quality results, therefor this briefing will outline the benefits and overall types of data than can be of use for the Inertial Labs Kalman Filter.
Need for Aiding Data:
When using mems based inertial measurement devices, there will always be drift in results without additional data being given to the system. For our main solution in the INS, this additional data comes from GNSS data, mitigating position drift and orientation drift based on the velocity of the object the device is mounted to. By adding additional features to help the unit know how it is moving relative to the inertial reference frame.
Kalman Filter:
When configuring the unit to accept aiding data, the INS GUI gives the user the ability to control the threshold for acceptable noise in aiding data being input into the Kalman filter. Such fields include: the noise of external horizontal and vertical position in aiding data; the noise of horizontal and vertical speed data; and Kalman filter residual thresholds.
Types of Aiding Data:
The INS can be configured to accept aiding data from a multitude of sources. The following list shows the accepted means of aiding data:
- Odometer (CANbus, OBD-II, Encoder, etc.)
- Air Speed
- Wind Speed
- Doppler Shift from Locator
- Heading External Sensor (Gyro-compass, etc.)
- DVL Data (or External Velocity Data)
- Sensor Bias External
- Pitch and Roll External
The following figure shows the accepted aiding data types, there data structure, and a description of the data.
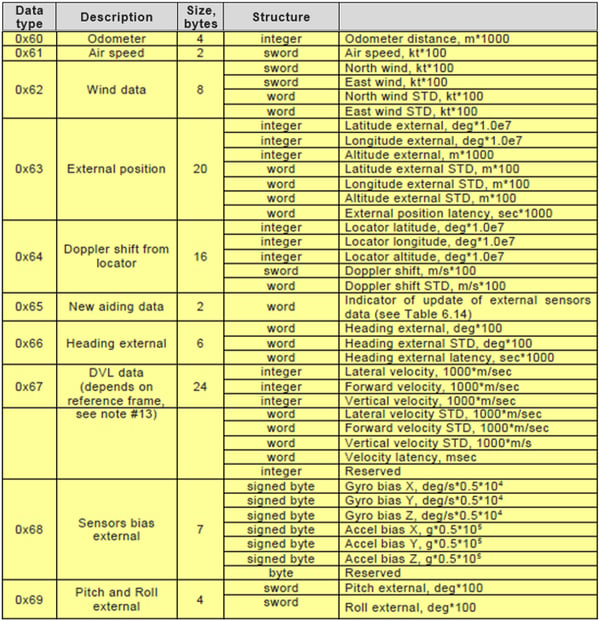 Figure 1. Allotted bytes for aiding data and the structure of the message being received to be integrated with Kalman Filter.
Figure 1. Allotted bytes for aiding data and the structure of the message being received to be integrated with Kalman Filter.
Customization of Aiding Data:
Regardless of the Aiding Data type, majority of data formats will need to converted into the acceptable message type to be filtered by the INS Kalman Filter. This can be done by using a micro-computer of sorts to collect all aiding data being used, and then outputting a single string of data to the INS. If there is any question on whether the INS supports an aiding device, or a specific aiding data message, the inertial labs customer support team is prompt to get you the help you need. They be reached directly through the service portal at:
https://inertiallabs.atlassian.net/servicedesk/customer/portals
Aiding Data Configurations (Land Vehicle):
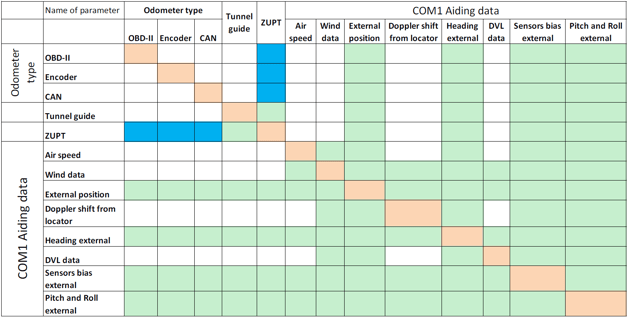
The follow list of potential configurations are commonly used options for improvement of the INS algorithm to achieve better position estimations in case of a GNSS-Denied environment. The table should be read as so: the left-hand column is the aiding data option that can be used with the respective highlighted options in that same row.
Note: The color colors are defined as follows: Blue – works during both GNSS and GNSS Denied environments with separate internal algorithm for both cases; Peach – That aiding data packet works with itself (trivial); Green – You may pair the corresponding aiding data packets with the respective Name of Parameter on the Y-Axis of table.
Useful Aiding Data for Land Vehicles:
Encoder (Odometer) – The Inertial Labs INS has the ability to input aiding data from an encoder (wheel speed sensor). The INS ordered from Inertial Labs will be factory configured to receive pulse/bi-phase signals from an encoder. The Graphical User Interface (GUI) will need to have the following values input to use the encoder properly as aiding data in the Kalman Filter: Wheel Circumference, Tics per Revolution, Pulse Length, ZUPT Threshold, Odometer Offset, Standard Deviation of the Odometer Noise, and the Residual Threshold. All of these values are explained thoroughly in Section 4.2.4.1 of the INS User Manual, with instructions in Section 10.7.3 of the User Manual.
OBDII (Odometer) – The INS can be configured to allow input from an OBDII odometer for better performance during dead-reckoning. Section 6.6.1 in the INS ICD are useful in outlining the parameters that must be configured for setting up the INS to allow for input of OBDII data. Section 10.7.1 of the INS User Manual has information for configuration.
CAN (Odometer) – Information on setting up an odometer using a CAN interface can be found in Section 10.7.2 of the INS User Manual. Additional information on the CAN interface for odometer configuration is located in the INS ICD Section 6.6.3.
Tunnel Guide – Section 4.3 of the INS User Manual describes how to toggle the use of the Tunnel Guide corrections option. Section 6.6.5 of the INS ICD describes more details in regards to functionality of this feature.
ZUPT - Section 4.3 of the INS User Manual describes how to toggle the use of the ZUPT corrections option. Section 6.6.5 of the INS ICD describes more details in regards to functionality of this feature.
Other Useful Aiding Data – For configuring other aiding data inputs such as Air Speed, Wind Speed, External Position, Doppler Shift from Locator, External Heading, DVL, Sensor Bias External, and External Pitch and Roll; please visit Section 6.6 of the INS ICD for information on how to input data over COM 1.
About Inertial Labs:
Established in 2001, Inertial Labs is a leader in position and orientation technologies for commercial, industrial, aerospace and defense applications. Inertial Labs has a worldwide distributor and representative network covering 20+ countries across 6 continents and a standard product line spanning from Inertial Measurement Units (IMU) to GPS-Aided Inertial Navigation Systems (INS). With application breadth on Land, Air, and Sea; Inertial Labs covers the gambit of inertial technologies and solutions.