Purpose: To determine which type of heading correction is best for different applications of the INS.
Last Updated: June 2020
For INS-D/DL: The “Dual GNSS” type of heading correction can be used for any application that allows the installation of the INS and two GNSS antennas with a baseline of at least 1.5 m (it can be static, quasi-static, and slowly moving objects as well as objects with high dynamic). So, any application where two antennas can be installed with a clear view of the sky and less than 1.5 meters away from one each other. When Dual GNSS type is used, the algorithm starts as soon as the GNSS receiver provides a heading solution.

For INS-B: The “Inertial” heading correction type should be used. This type of correction starts only when the object is moving with a velocity of 2.4 m/s for land vehicles and 10 m/s for aircraft for at least 3 seconds.
For INS-P: This device uses a single antenna receiver and a fluxgate magnetometer, the “Magnetometers” heading correction type should be used for the cases when the GNSS satellites are mostly not available, or the object is static/quasi-static. The “Inertial” heading correction type should be used if the carrier object can initially reach a high velocity (2.4 m/s for land vehicles and 10 m/s for aircraft) - in this case, when the GNSS solution is available it will be used for heading correction, and when there is a GNSS outage, then the magnetometer data will be used for heading correction.

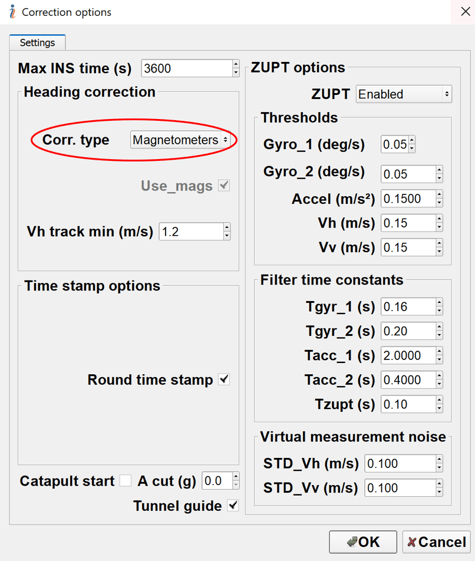
To access the heading correction, go to the “Options” main-menu drop-down window and then select “Correction options” and modify the “Correction type” as shown below.