Purpose: To explain what INS features improve position error in GNSS denied environments.
Last Updated: June 2020
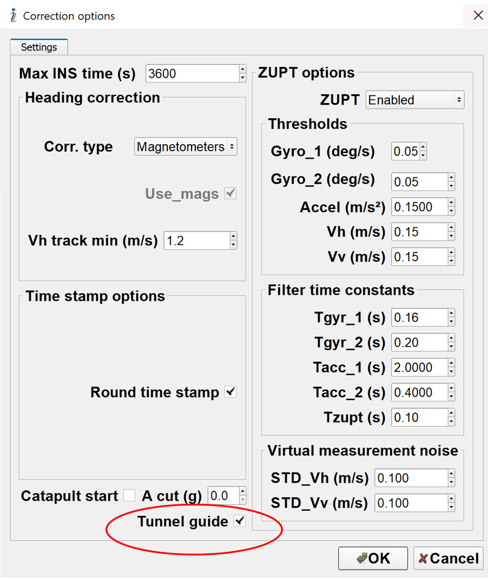
When using the Inertial Navigation System (INS), position error accumulation is always a concern. One way a user can limit this error is by enabling the “Tunnel Guide” feature (only available for fixed-axle land vehicle). When enabled, it allows the INS to reduce its accumulated errors during extended GNSS outages. Use this feature when external aiding data is unavailable. To do so, go to the “Correction options window of the “Options” tab and enable “Tunnel guide” as shown below.
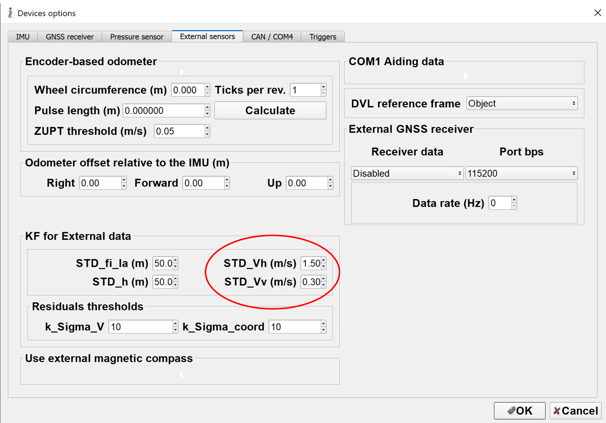
When “Tunnel guide” feature is chosen, to ensure proper Kalman Filter calculation, set noise of horizontal speed data “STD_Vh (m/s)” to 1.5 and vertical speed data “STD_Vv (m/s)” to 0.3 in the “External sensors” tab of “Devices options…” window as shown below.
 Note: “Tunnel guide” feature is only available for fixed axle land vehicles like a car.
Note: “Tunnel guide” feature is only available for fixed axle land vehicles like a car.
Another feature that may help is enabling ZUPT. When enabled, ZUPT allows the INS to reduce its accumulated orientation and position errors once a carrier object stops.
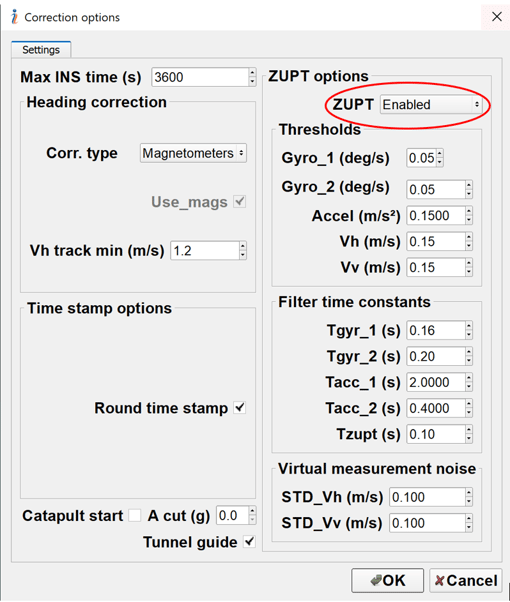
Note that for certain applications where complete motionless state is not achievable, such as marine or airborne applications, ZUPT option should be disabled. The default setting of ZUPT is disabled.
Some other ways that you can improve position accuracy in GNSS denied environments is to use the magnetometer for heading correction and aiding data from the Distance Measurement Instrument (DMI; i.e – and OBD-II sensor, encoder, or odometer).
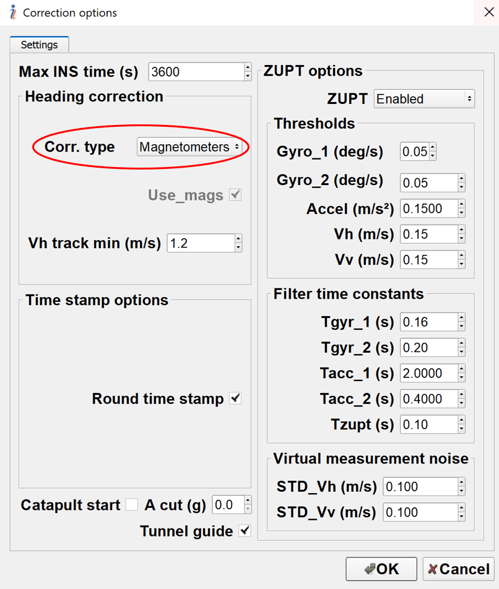
Note: If the device is in an environment with a lot of magnetic interference, do not use the magnetometer for heading correction.
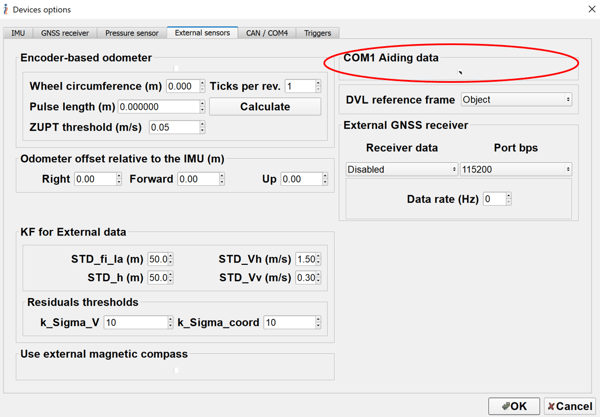
To enable aiding data, go into the “Device options” tab and go to the “External sensors” tab and then select “COM1 Aiding data”. Visit at the INS ICD for information on configuring aiding data packets and sending them to the INS.